
LiDARインフラを活用したロボット走行の安定性・安全性向上実証実験
実施主体
大田区、羽田みらい開発株式会社、鹿島建設株式会社、株式会社日本総合研究所、株式会社ハイパーデジタルツイン、SolidSurface株式会社、SBSロジコム株式会社
実施期間
2023年6月~2024年3月
国土交通省が支援する令和5年度スマートシティ実装化支援事業(以下、令和5年度支援事業)に採択され、LiDARセンサを建物側に設置し活用した、車路侵入物検知・回避システムによるロボットの走行実証実験を実施しました。システムの対応速度計測やLiDARセンサの性能を基にした安全な設置要件の検証を行うことで、車両等が走行する公道環境下における走行安全性を検証しました。
また、HANEDA INNOVATION CITY(以下、HICity)で実証実験中の統合管制システムと連携することによる有効性の検討・HICityの物流業者へのヒアリングを実施しました。これにより期待される点や課題を明らかにし、今後の横展開可能性について広く検討しました。

実施方法
- 令和5年度支援事業内では、一部公道が含まれるHICityの1階車路と荷捌き場内を対象に実証実験を実施しました。
- 実験に利用するロボットは「遠隔操作小型車」の内、「みなし歩行者」として走行することで、警視庁から認可取得の上実験を行いました(みなし歩行者としての認可であり、遠隔操作小型車の正式認定ではない)。
- HICity1階建物側に合計6箇所にLiDARセンサを設置し、LiDARセンサが侵入物を検知した場合に周辺のロボット、モビリティへ検出結果を通知するシステムを開発しました。同情報を1階車路を通る歩行者が判断できるようにするため、侵入物を検知すると点灯し、離脱すると消灯する可視化パトランプを用意しました。
- 実用性検証では、下記の3点を実施しました。
①侵入物検知時に[侵入物の位置]と[ロボットの現在位置]により、接近侵入である事を判断し、ロボットへの停止命令を送信し安全な走行停止の検証を実施。
②侵入物検知~ロボットへの停止指示発行までにかかる時間の算出をし、実用に値するかの検証を実施。
③条件パラメータ(ロボットや侵入物の走行速度、対象エリアの距離、LiDARの高さ等)を用いた机上検証による設置要件を検討。 - ビジネスモデル検証では、HICityでロボットの導入検討中のSBSロジコム株式会社に実証実験を見学していただき、その有用性や、付随する期待や課題を明らかにしました。
成果と課題
- 成果:死角から進入する移動体や、遠方から高速で接近する移動体の検知・回避はロボットの機能だけでは難しいという課題に対し、”建物インフラ”としてLiDARセンサを活用した侵入物検知システムを構築し、補助機能としての汎用性を確認しました。これは、既にHICityで実施されているフードデリバリー実証で利用されているロボット管制システムと連携して実現しています。
実証実験から、基本機能の確認・システムが侵入物を検知しロボットに伝えるまでの速度やそれに関する課題の検討・設置要件に対する定量的検証など、他所で流用する際に検討すべきことが明確化されています。
また、本システム系と、既にHICityで実証実験が行われている「分野横断型ロボット統合管制システム」を連携することによる遠隔監視体制の人的負担削減の示唆が得られました。
- 課題:侵入物検知からロボット走行停止に係る遅延時間については、引き続き短縮に向けたシステム及び通信環境の改善を両輪で行うことが必要だと考えられます。また、ロボット間で共通で採用されるべき情報(横断歩道や停止エリアの情報等)は、将来的には都市OSやビルOSが活用されることが望ましいと考えられます。
なお、ロボット導入・運用にあたっては本システムのような安全性向上・監視人の負担を削減する取り組みが評価される一方で、制度や法的な視点から人的負担増加の懸念が見込まれ、ロボットの活用促進に向けては技術開発と同時に法・制度の切り口からも整理する必要があります。
プロジェクトの遍歴
2023年5月~2024年11月
『HICity1階荷捌き場走行のため、警視庁と協議を実施』
本支援事業でHICity車路のロボット走行がある事から、遠隔操作小型車の、みなし歩行者での走行のため警視庁と確認完了上、2023年11月中に走行が開始されしました。
2023年11月~2024年3月
『LiDARを活用したロボット走行安全性向上実証実験を実施』
実際にLiDARとロボット、侵入物としては安全性確保のため台車を利用して実証実験及び検証を実施しました。動作検証、机上検証のためのデータ取得、SBSロジコム株式会社の実験見学及びヒアリングを実施しています。
基本情報
- 事業名:スマートシティ実装化支援事業
- 実施団体名称:羽田第1ゾーンスマートシティ推進協議会
- 実施場所:羽田イノベーションシティ
関連URL

本支援事業で活用したHICity1階の荷捌き場内の地図です。ロボットの走行ルートが赤矢印、ロボットが渡る横断歩道は緑丸で示されています。

本支援事業で設置したLiDARセンサの場所とその詳細です。横断歩道の周辺をLiDARで捉えることができるように設置しています。

LiDARで捉えている点群データの可視化ビュワーの様子です。侵入物検知エリアが立方体で示され、そこに入った侵入物も色付きの立方体(バウンディングボックス)で表示されます。
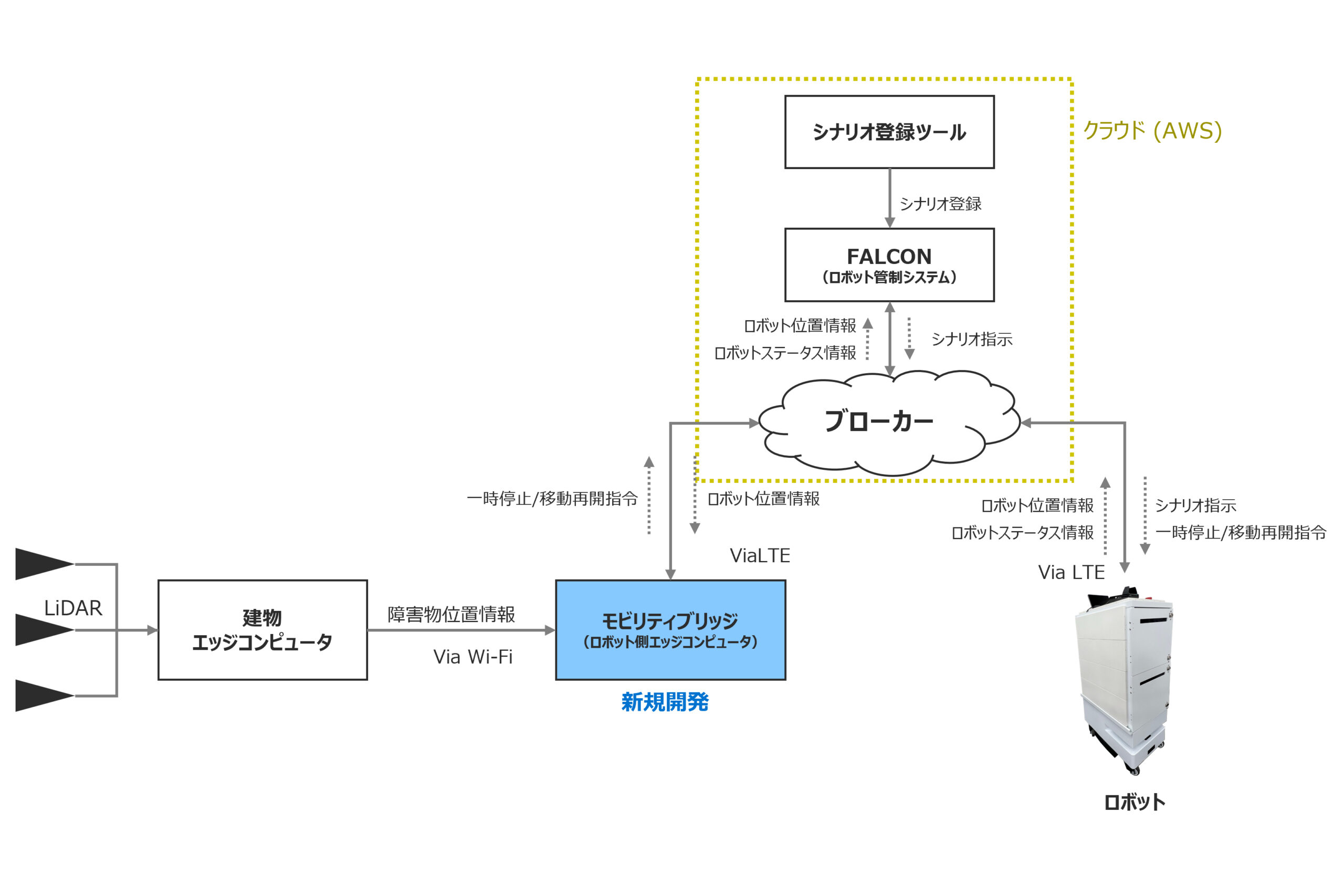
LiDARで捉えた侵入物がロボットに移動に関する指令が行くまでのシステムフロー図です。モビリティブリッジ(SolidSurface社による開発)が障害物とロボットの位置情報を基に、移動指令を判断します。
HICity1階の荷捌き場内で実際にロボットが横断歩道で実証実験を行っている様子。「みなし歩行者」のためロボットを走行させる者と一緒に走行しています。実用に向けては遠隔監視による走行が求められます。
