令和5年度 複数のモビリティの協調運行に関する実証調査研究
本プロジェクトは、デジタル庁からの委託で実施された調査研究であり、HANEDA INNOVATION CITY(以下、HICity)を実証フィールドとして実施されました。
様々な社会課題を理由にモビリティの活用が求められてきている一方で、社会実装は民間の一部エリアに留まり、活用機会が限定的である事について、以下の3点に注目して課題設定をしました。
・複数モビリティの協調制御の技術やインフラ基盤がない。
・モビリティに関する制度/ルールの制定が進まず、事故や過失時の責任を負いきれない。
・個社での集約管理的なロボット運行では、投資に対するビジネスの収益性が見合わない。
本プロジェクトでは、モビリティ運行による責任の集中や経済性といった課題に対して、複数モビリティが協調的に運行され、かつサービスを組み合わせて需要を集約することができる「分散協調」の仕組みが有効と考え検討を進めました。
また、共有された情報に基づく複数ベンダーロボットの自律的な運行を実証の目的とし、モビリティ観点での環境情報や運行情報の共有、設備利用などの検証を特定の場(HICity)での実証を通じて検証しました。

- プロジェクトでは4つのユースケースで実証実験、及び分散協調のアーキテクチャ検証、および経済性・責任検証を進めました。
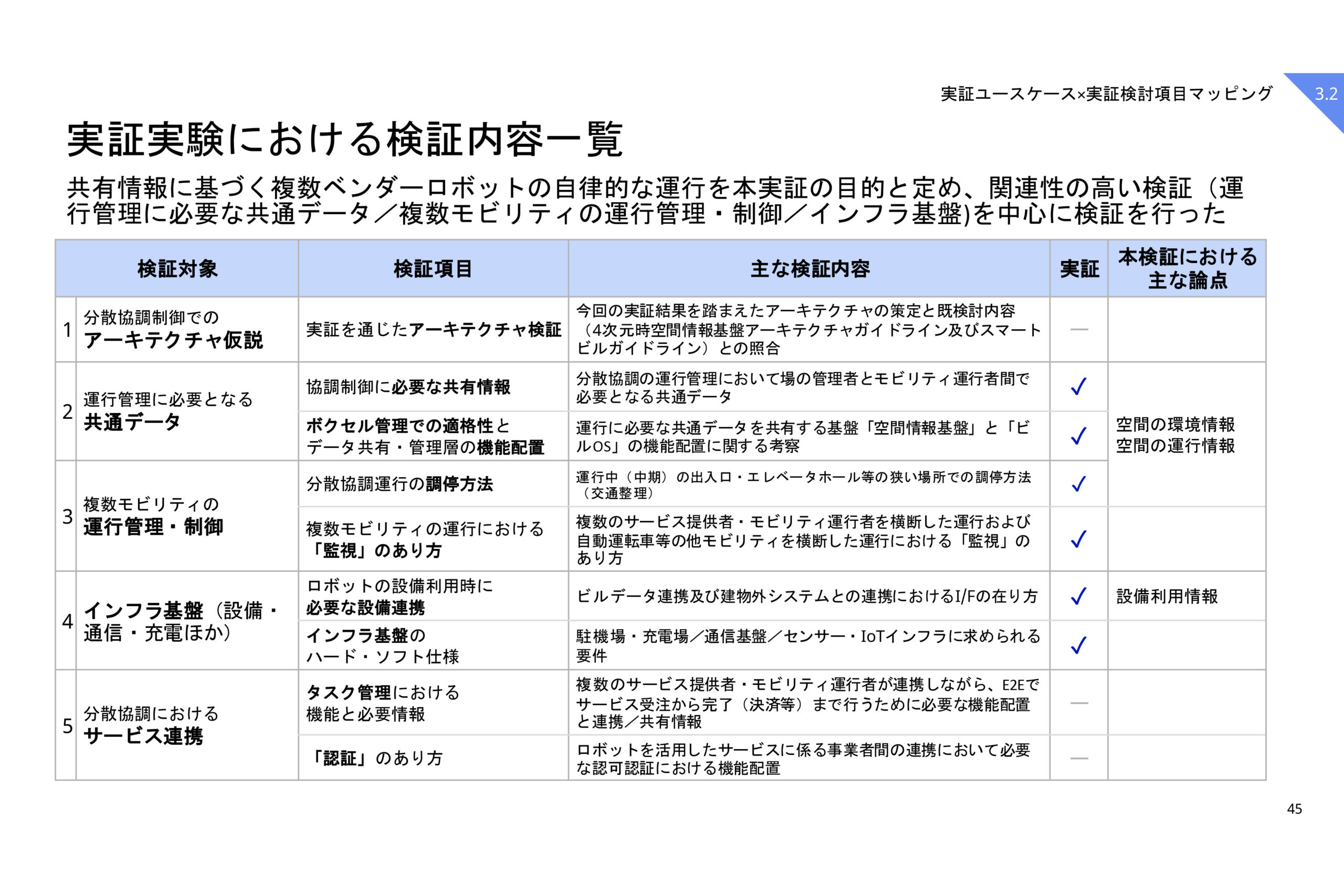
- 実証実験における4つのユースケース及び目的は下記の通りです。また、実証実験における検証内容の一覧を(写真1)に示します。
A.警備・清掃…位置情報の可視化、マルチパーパス
B.飲食運搬…位置情報の可視化
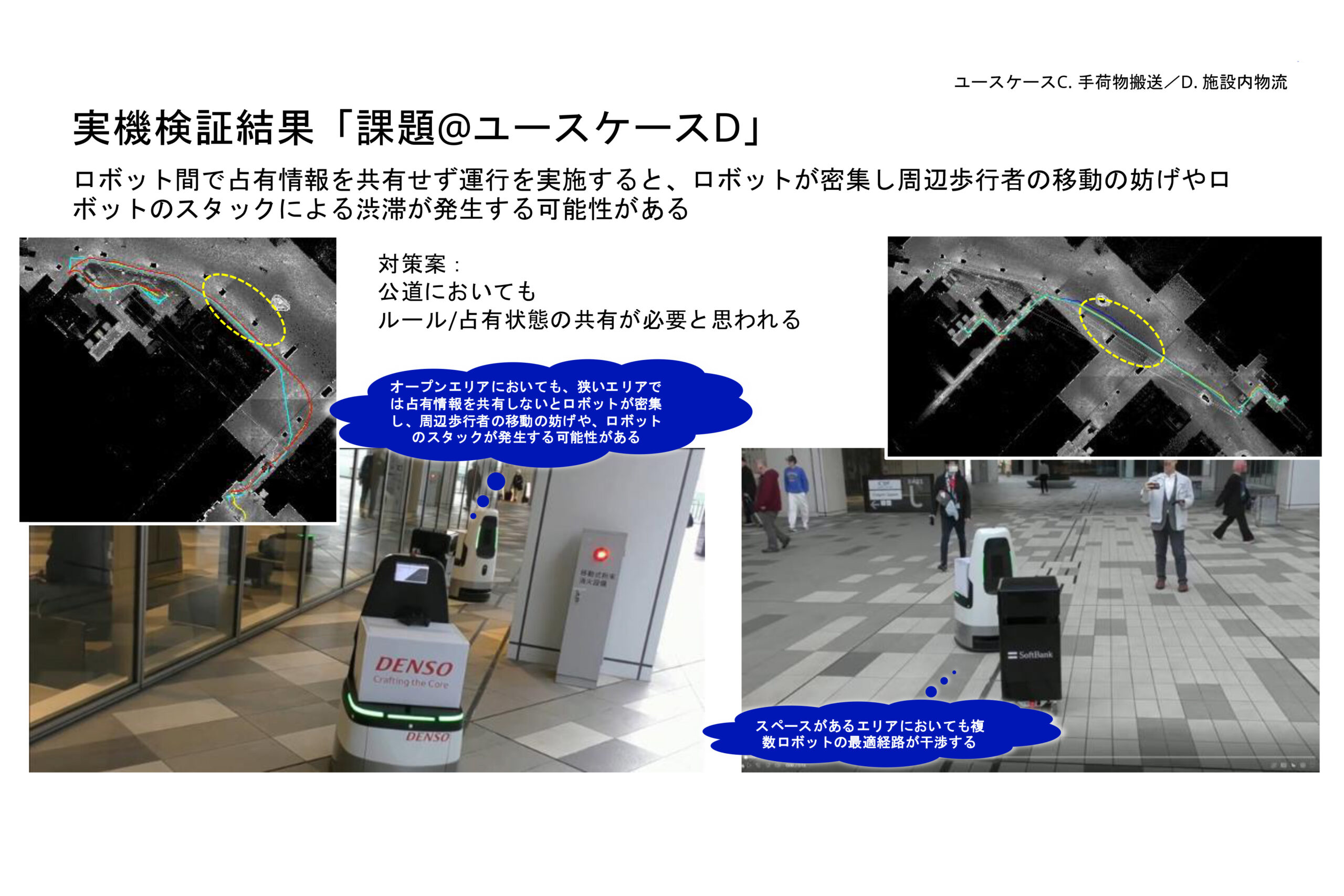
C.手荷物搬送…ロボット同士の経路調停
D.施設内物流…ロボット同士の経路調停およびエレベータ連携(施設利用) - アーキテクチャ検証では、モビリティがが運行するインフラ(施設設備や通信等)を提供する「場」、ロボットなどのモビリティを提供する「モビリティ」、モビリティを活用してサービスを提供する「サービス」の3層の主体をおき検証しました。
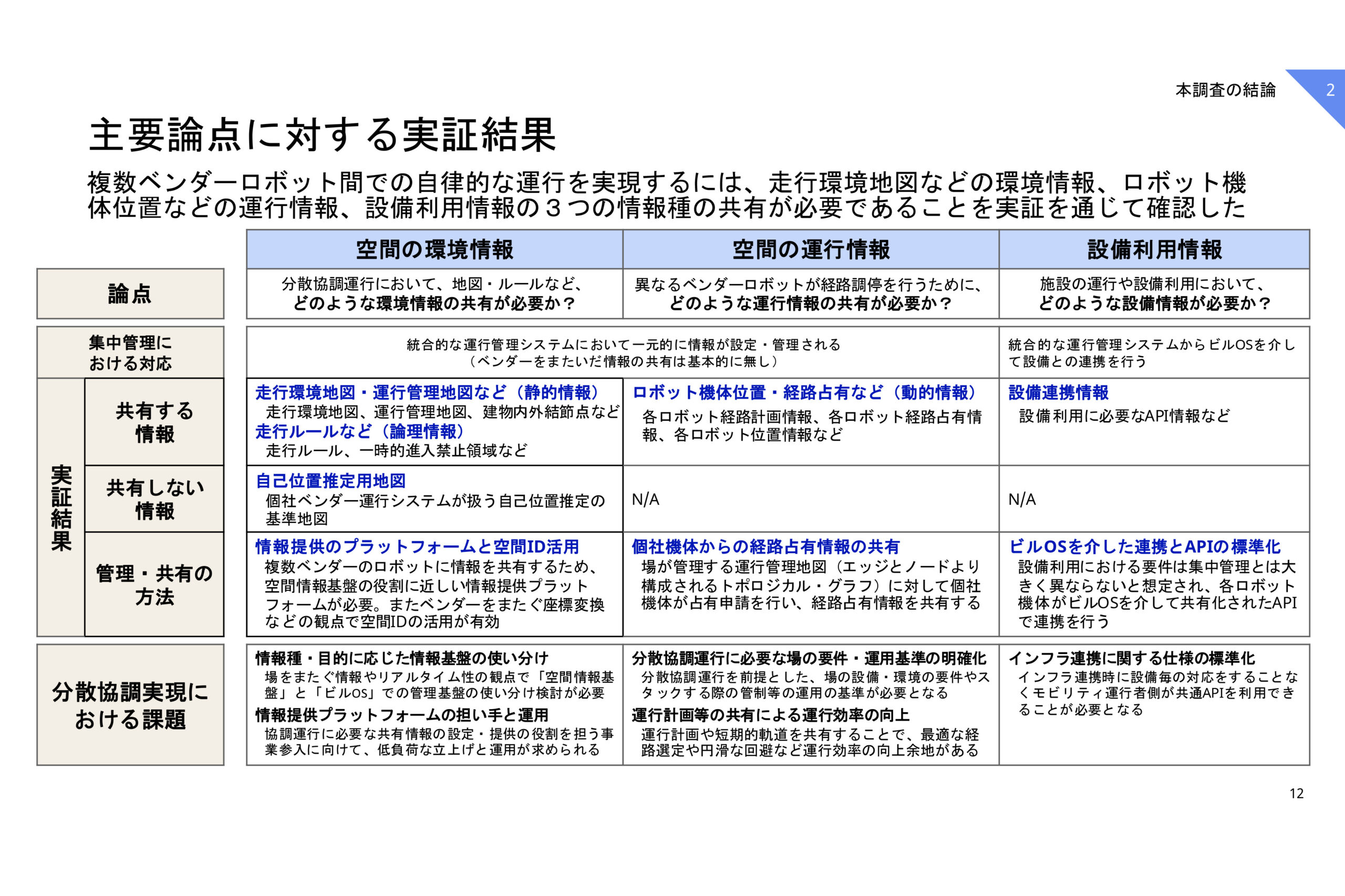
・複数ベンダーロボット間での自律的な運行の実現に必要な情報について:
走行環境地図などの「環境情報」、ロボット機体位置などの「運行情報」、「設備利用情報」の3種の情報の共有が必要であることを実証を通じて確認しました。
その結果、進入禁止領域などの「環境情報」については異なるベンダー間でも”空間ID(※1)”を通して共有することが望ましいと明らかになりました。また、「運行情報」については”トポロジカル・グラフ(※2)”を用いることにより経路調停は可能ですが、各ロボットの座標系の統一や、複数ロボットにおける経路占有のリアルタイム性、ルール設定に課題が残りました。また、モビリティの施設利用については、場の管理者が設備を利用するための統一的なAPI(※3)を提供し、参入者側が提供されているAPIに合わせる事が望ましいと示唆出しされました。(写真2)
実証実験の様子として、(写真6)にトポロジカル・グラフによる制御で経路調停が行われている様子(写真7)ではロボット間での占有情報の共有の必要性が分かる場面を掲載します。
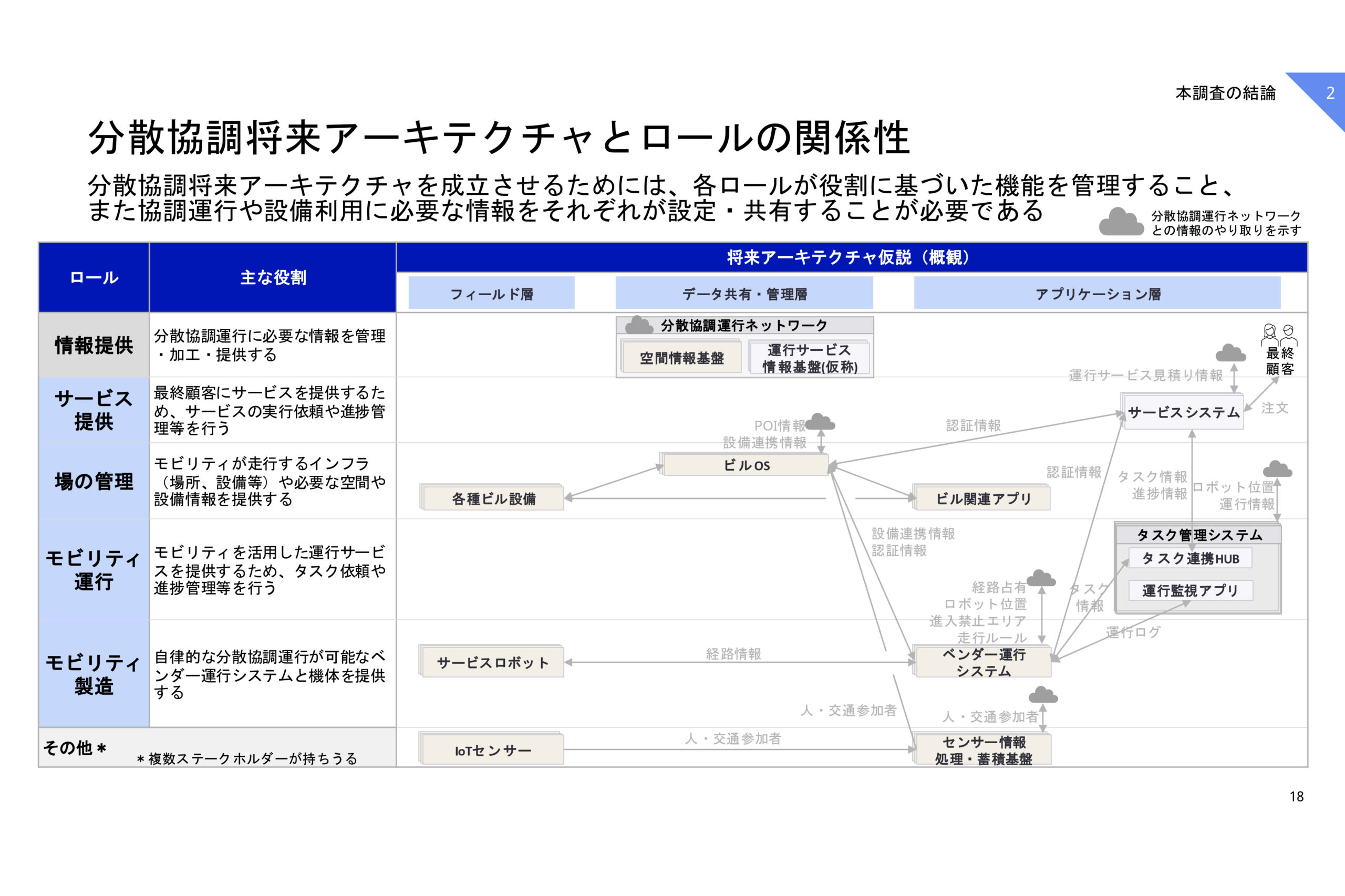
・将来アーキテクチャの仮設:施設Aと施設Bを行き来するような、場を跨いだ協調運行に必要となるアーキテクチャの将来像の仮設を導き出しました。この実現には、各主体が、役割に沿った機能を管理する事、そして協調運行や設備利用に必要な情報をそれぞれが設定し共有することが必要と結論付けられました。(写真3)
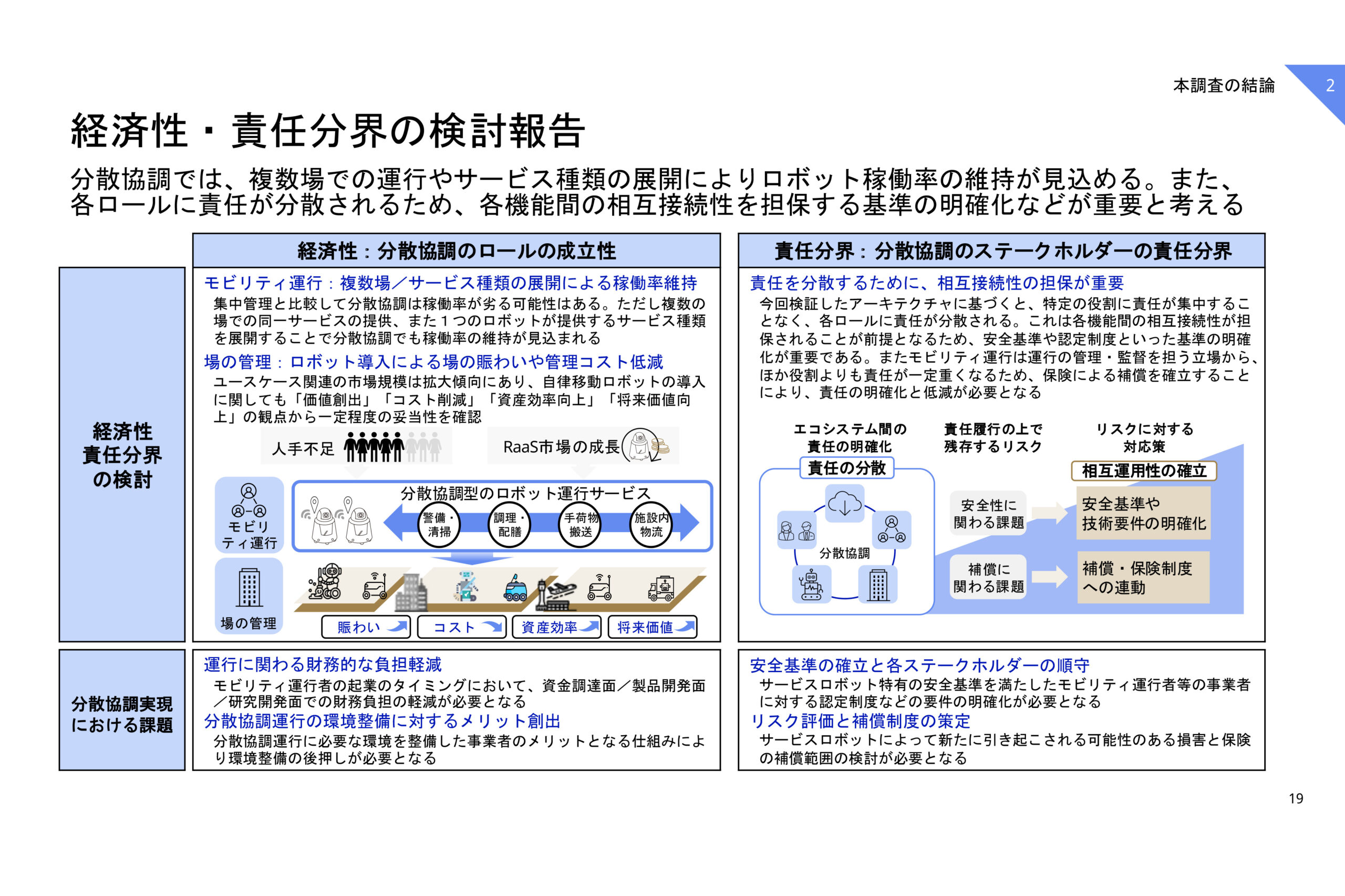
・経済性について:複数の場での同一サービスの提供、また1つのロボットが複数のサービスを提供することでロボット稼働率の維持が見込まれます。一方で、今後の発展のためにはモビリティ運行者の資金調達面/製品開発面/研究開発面での財務負担の軽減が必要になると考えられます。
・責任分界について:今回検証したアーキテクチャに基づくと、各主体に責任は分散されます。保険による補償を確立することにより責任の明確化と低減が必要となると考えられます。(写真4)
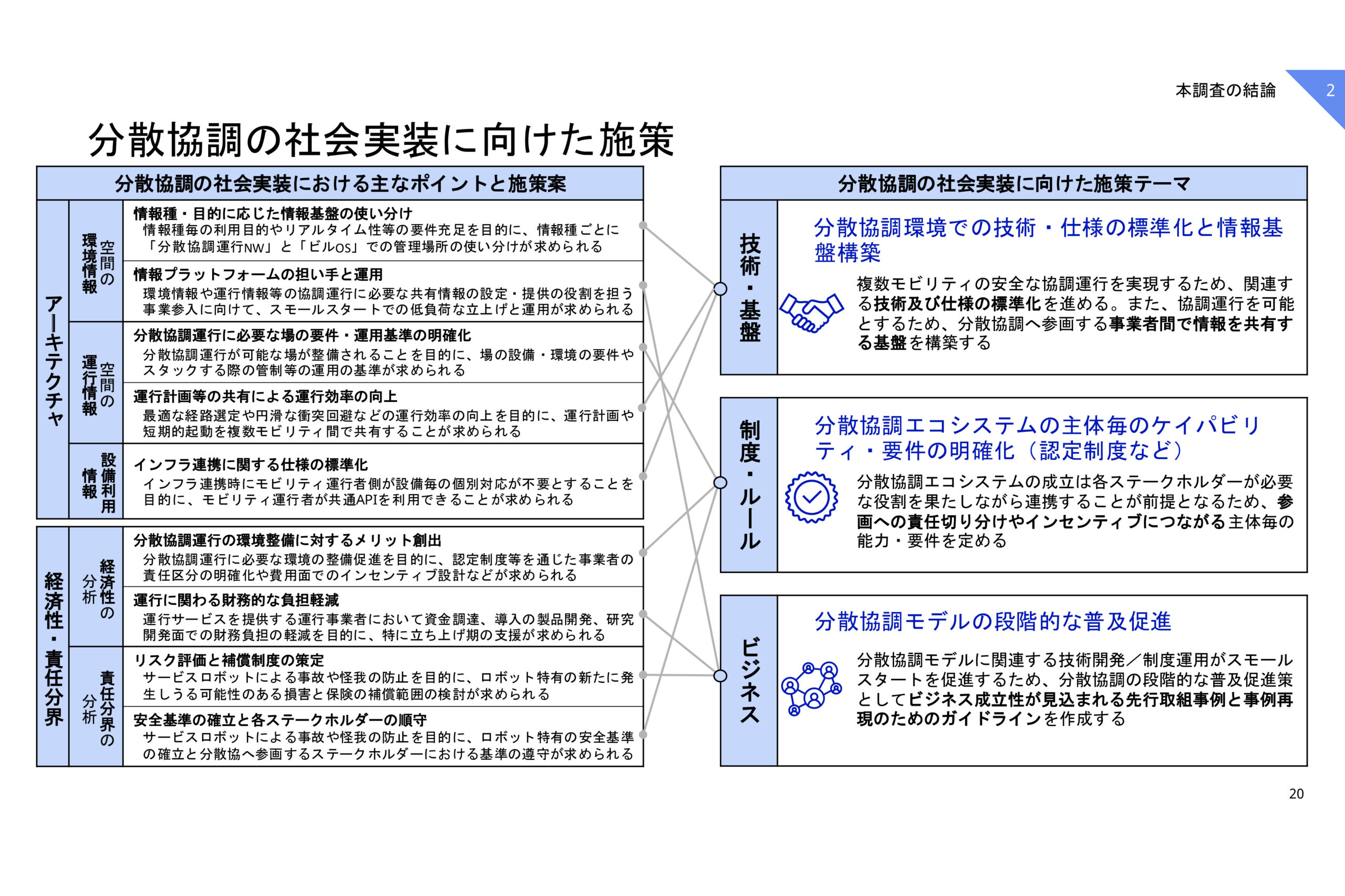
・分散協調の社会実装に向けた施策のテーマとしては、「技術・基盤」 「精度・ルール」 「ビジネス」の3点が求められるだろうと示唆出しされました。(写真5)
※1…地球上の特定の空間領域を一意に識別するための識別子。空間領域の単位は、3次元空間を直方格子状に分割した直方体であり、様々なサイズを設定することができる。また、階層構造を持ち、親子関係も持たせることができる。
参考:経済産業省、国土交通省、国土地理院、国立研究開発法人 新エネルギー・産業技術総合開発機構、独立行政法人 情報処理推進機構. “4次元時空間情報利活用のための空間IDガイドライン(1.0版).” 経済産業省、https://www.meti.go.jp/policy/mono_info_service/digital_architecture/lifeline.html(アクセス日: 2025年5月15日)
※2…エッジ(線)とノード(点)により構成され、各機体が占有申請を行うことにより経路占有情報を気共有する。
※3…ソフトウェア同士を連携するための仕組みのこと。
2023年8月 実証準備開始
事象ユースケース検討、検証内容・方法詳細化。
2023年9月 実証実験業務開始
実証環境の構築を開始。
2023年11月 実証開始
4つのユースケースごとに準備、実験、結果整理を実施。
アーキテクチャ検証開始。ビジネスモデル検討、経済性分析を実施。
2024年2月 実証実験完了
実証実験の結果整理まで完了。
責任分界検討を開始。
2024年3月 最終報告
3月末までに調査報告書完了。
- 事業名:令和5年度「複数のモビリティの協調運行に関する実証調査研究」 (デジタル庁)
- 実施場所:HANEDA INNOVATION CITY
- 実施会社:本実証に参画したコンソーシアム企業名(五十音順):EYストラテジー・アンド・コンサルティング株式会社、鹿島建設株式会社、株式会社デンソー、川崎重工業株式会社/本実証における協力企業名(五十音順):SolidSurface株式会社(鹿島建設株式会社委託先)、ソフトバンク株式会社(株式会社デンソー委託先)
・本プロジェクトの全体像(デジタル庁)
https://www.digital.go.jp/policies/mobility
・複数のモビリティの協調運行に関する実証調査研究 最終報告書(概要版)
https://www.digital.go.jp/assets/contents/node/basic_page/field_ref_resources/9f4e70e2-2335-4181-8293-258c12549d31/8d42a535/20240508_policies_mobility_report_01.pdf
・複数のモビリティの協調運行に関する実証調査研究 最終報告書(詳細版)
https://www.digital.go.jp/assets/contents/node/basic_page/field_ref_resources/9f4e70e2-2335-4181-8293-258c12549d31/3045743d/20240508_policies_mobility_report_02.pdf
・本実証におけるロボットサービス運行基盤の仕様解説 報告書別添
https://www.digital.go.jp/assets/contents/node/basic_page/field_ref_resources/9f4e70e2-2335-4181-8293-258c12549d31/e114b043/20240508_policies_mobility_report_03.pdf
※本ページは、最終報告書(概要版)及び最終報告書(詳細版)の情報を元に記載しています。